Nissan se inspira en el movimiento de las abejas y de los peces para evitar accidentes

Los ingenieros de Nissan se están inspirando en el movimiento de las abejas y de los peces para desarrollar las nuevas tecnologías que determinarán el futuro de la movilidad con el objetivo de reducir al mínimo los accidentes. Toru Futami, Director de Tecnología e Investigación Avanzada, sostiene que el estudio del comportamiento de los animales que se mueven en grupo ayuda a los ingenieros a entender cómo los vehículos pueden interactuar unos con otros para lograr un entorno de conducción más seguro y eficiente. “En nuestra búsqueda constante para desarrollar sistemas anticolisión para la próxima generación de automóviles, necesitamos inspirarnos en la madre naturaleza para encontrar la respuesta más adecuada. En este momento, la investigación se centra en los patrones de comportamiento de los peces”.
Contenido de la información:
Basado en el vuelo de las abejas, que no se chocan
El equipo de investigación ha creado el EPORO (EPisodio 0 RObot), utilizando la tecnología láser LRF (Laser Range Finder) -inspirada en los ojos compuestos de las abejas, cuyo campo de visión abarca más de 300 grados-, junto con otras tecnologías avanzadas. Seis unidades del robot EPORO se comunican entre sí para controlar sus posiciones. El objetivo es doble: evitar colisiones y ser capaces de viajar de lado a lado o en una sola dirección, del mismo modo que lo hacen los peces cuando se mueven bajo el agua agrupados en bancos.
“En las leyes de tráfico actuales se supone que los coches conducen dentro de los carriles y obedecen a señales viales por orden del conductor, pero si todos los coches fueran autónomos, la necesidad de carriles e incluso señales podría desaparecer. Hablábamos antes sobre los peces, y el pez sigue estas tres reglas: no te vayas demasiado lejos, no te pongas demasiado cerca y no golpees a los demás. Un banco de peces no tiene líneas que le ayude a guiarse, pero sus integrantes se las arreglan para nadar muy cerca los unos de los otros. Así que si los coches pudieran comportarse en grupo de la misma manera y de forma autónoma, deberíamos ser capaces de tener más vehículos funcionando al mismo tiempo sin necesidad de aumentar el ancho de las carreteras. Esto solucionaría las congestiones de tráfico”, explica Futami.

Futami añade que el robot también tiene la capacidad de comunicarse con sus semejantes en una intersección, de manera que puede tomar la decisión de cuáles podrían pasar y cuáles no, eliminando así la necesidad de señales de tráfico.
Antes del desarrollo de EPORO, Nissan creó la unidad biométrica Car Robot, o BR23C, que imita la curiosa habilidad para evitar colisiones de las abejas. Se trata de un proyecto conjunto con el Centro de Investigación de Ciencia y Tecnología Avanzada en la renombrada Universidad de Tokio.
Inspirado en los ojos compuestos de la abeja, que pueden ver más de 300 grados, el láser LRF (Laser Range Finder) detecta los obstáculos en un radio de 180 grados hasta dos metros de distancia. El BR23C calcula la distancia al obstáculo y, a continuación, envía inmediatamente una señal a un microprocesador, que traduce esta información y mueve o cambia la posición del robot para evitar una colisión.
“En una fracción de segundo detecta un obstáculo”, explica Toshiyuki Andou, Director del Laboratorio de Movilidad de Nissan y responsable principal del proyecto, “el robot imitará los movimientos de una abeja y de inmediato cambiará de dirección para evitar un choque”.
El Eporo de Nissan evita las colisiones circulando como los peces
 EPORO: abreviatura de EPisode O (cero) Robot (el objetivo es conseguir un vehículo sin emisiones de CO2 y sin accidentes). Algo así como el coche sin emisiones y sin accidentes debido que circula imitando el comportamiento de los peces y, por tanto, evitando las colisiones. ¿Realidad o ficción? Nissan realizará una demostración de esta avanzada tecnología mediante un grupo de seis EPORO durante su presentación mundial en la CEATEC JAPAN 2009, que se celebrará del 6 al 10 de octubre en el centro de convenciones Makuhari Messe.
EPORO: abreviatura de EPisode O (cero) Robot (el objetivo es conseguir un vehículo sin emisiones de CO2 y sin accidentes). Algo así como el coche sin emisiones y sin accidentes debido que circula imitando el comportamiento de los peces y, por tanto, evitando las colisiones. ¿Realidad o ficción? Nissan realizará una demostración de esta avanzada tecnología mediante un grupo de seis EPORO durante su presentación mundial en la CEATEC JAPAN 2009, que se celebrará del 6 al 10 de octubre en el centro de convenciones Makuhari Messe.
En 2008 fue el vuelo del abejorro lo que inspiró el prototipo “BR23C” de coche biomimético de Nissan. En 2009, la tecnología inspirada en los peces es la protagonista del nuevo prototipo de coche robotizado, el Nissan “EPORO”*1 de Nissan Motor Co., Ltd. Este prototipo ha sido diseñado para desplazarse en grupo siguiendo los patrones de conducta de un banco de peces a la hora de evitar obstáculos sin chocar unos con otros.
CEATEC JAPAN es una feria anual que presenta las tecnologías electrónicas y de información más avanzadas. Nissan es el único fabricante de automóviles que ha participado en esta feria desde 2006. Además, de presentar el futurista prototipo EPORO, Minoru Shinohara, Vicepresidente Senior de Nissan, realizará el discurso de apertura titulado “El futuro del automóvil y la evolución de los vehículos eléctricos y la robótica aplicada a los coches”, y participará en una mesa redonda titulada “El vehículo eléctrico conducirá a una sociedad totalmente electrificada y movilizada”.
Nissan también presentará la nueva tecnología actual de prevención de colisiones del Skyline Crossover y realizará pruebas de conducción para probar un sistema de diagnóstico de conducción ecológica utilizando una aplicación para el iPhone.
Coche robotizado EPORO¿Qué tienen en común un abejorro y un banco de peces? Ambos cuentan con unas habilidades extraordinarias para evitar colisiones; navegan de manera instintiva e inteligente por terrenos difíciles y detectan y evitan los posibles obstáculos -lo mismo que podrían llegar a hacer los futuros vehículos seguros de Nissan.
 Pero si es probable que los abejorros -y el coche robotizado BR23C- viajen solos, el comportamiento en grupo de los peces, o de un grupo de vehículos, supone un reto mucho mayor a la hora de evitar una posible colisión. En el momento de desarrollar el EPORO se han aplicado tres reglas de comportamiento de los peces a su control de conducción.
Pero si es probable que los abejorros -y el coche robotizado BR23C- viajen solos, el comportamiento en grupo de los peces, o de un grupo de vehículos, supone un reto mucho mayor a la hora de evitar una posible colisión. En el momento de desarrollar el EPORO se han aplicado tres reglas de comportamiento de los peces a su control de conducción.
Generalmente los peces reconocen su entorno a través de su sentido lateral y de su vista, y forman bancos siguiendo tres normas de comportamiento. Para el sentido lateral se ha utilizado un localizador láser*4, mientras que para el sentido de la vista se utiliza tecnología de comunicaciones de banda ultra ancha.
Normas de comportamiento de los peces
ÁREA 1: Evasión de la colisión Cambiar la trayectoria sin chocar con otros peces.
ÁREA 2: Desplazamiento en grupo Desplazamiento en grupo con otros peces manteniendo una cierta distancia entre ellos (para viajar a la misma velocidad).
ÁREA 3: Acercamiento El pez se acerca a otros peces que se encuentran a cierta distancia.
Toshiyuki Androu, Director del Laboratorio Nissan de Movilidad e ingeniero principal del proyecto del vehículo robotizado, ha declarado: “En un mundo tan motorizado, tenemos mucho que aprender del comportamiento de un banco de peces, en términos del grado de libertad y seguridad que tiene un pez dentro de un banco y de la gran eficiencia migratoria de un banco de peces por sí mismo. En el EPORO hemos recreado el comportamiento de un banco de peces mediante tecnología electrónica de última generación. Al compartir la información que recibe cada componente del grupo de sus compañeros, a través de tecnología de comunicación, el grupo de vehículos EPORO puede desplazarse de manera segura y cambiar de forma si lo necesita”.
Éste es el primer coche robotizado que se puede desplazar en grupo compartiendo su posición e información con otros vehículos del grupo a través de tecnología de comunicación.
Aunque la investigación actual de Nissan va dirigida a crear vehículos anticolisión basándose en su idea de seguridad llamada “Escudo de seguridad”*6, las nuevas tecnologías utilizadas en el EPORO también tienen el objetivo de mejorar la eficiencia migratoria de un grupo de vehículos y contribuir a crear un entorno de conducción respetuoso con el medio ambiente y libre de atascos.
El coche robótico que evita los accidentes se inspira en el vuelo de una abeja
 ¿Qué mejor manera de avanzar en el desarrollo de tecnologías para la prevención de accidentes que imitar a algunos de los mejores ejemplos de la evasión de accidentes del mundo natural como, por ejemplo, las abejas? En un sorprendente proyecto que será presentado en la CEATEC, las abejas han inspirado a los ingenieros del Centro Técnico Avanzado de Nissan en un matiz estratégico sobre cómo diseñar la próxima generación de sistemas para evitar los accidentes.
¿Qué mejor manera de avanzar en el desarrollo de tecnologías para la prevención de accidentes que imitar a algunos de los mejores ejemplos de la evasión de accidentes del mundo natural como, por ejemplo, las abejas? En un sorprendente proyecto que será presentado en la CEATEC, las abejas han inspirado a los ingenieros del Centro Técnico Avanzado de Nissan en un matiz estratégico sobre cómo diseñar la próxima generación de sistemas para evitar los accidentes.
Desarrollado en colaboración con el Centro para la Investigación de Ciencia y Tecnología Avanzadas de la prestigiosa Universidad de Tokio, en Japón, Nissan ha construido el Bio-mimetic Car Robot Drive, o BR23C, un microcoche robótico que reproduce las características de una abeja con el objetivo final de producir un sistema que prevenga las colisiones en general.
Descrito por Kazuhiro Doi, director general de Relaciones Públicas para Tecnología e Investigación y Desarrollo de Gestión de Marca, como una ampliación del Escudo de Seguridad de cuatro áreas de Nissan, el coche robótico BR23C tiene la intención de mejorar el área más interna de ese escudo y, al hacerlo, reforzar las capacidades de prevención de colisiones de los vehículos de la marca.
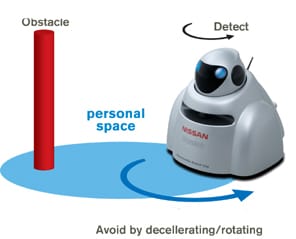
“Durante su vuelo, cada abeja crea su propio espacio personal con forma ovalada, que de hecho se parece mucho a nuestro Escudo de Seguridad,” afirmó Doi.
Pero lo que es más importante son los ojos compuestos de la abeja, capaces de ver con un ángulo de más de 300 grados en todas direcciones, lo que le permite volar sin interrupción dentro de su propio espacio personal.
Para recrear la función de un ojo compuesto, los ingenieros diseñaron la idea del Laser Range Finder (localizador láser).
El LRF detecta los obstáculos que se encuentren hasta a dos metros de distancia dentro de un radio de 180 grados delante del BR23C, calcula la distancia hasta dicho objeto y envía una señal a un microprocesador de abordo, lo que inmediatamente se traduce en la prevención de la colisión.
“En el mismo momento que detecte un obstáculo, el coche robótico imitará los movimientos de una abeja e inmediatamente cambiará de dirección girando sus ruedas en ángulo recto o mayor para evitar la colisión. La mayor diferencia con cualquier sistema existente es que la maniobra de evasión es totalmente instintiva. Si no fuera así, el coche robótico no sería capaz de reaccionar con suficiente rapidez para evitar los obstáculos,” nos explica Toshiyuki Andoh, director del Laboratorio de Movilidad y principal ingeniero del proyecto del coche robótico.
“Debe reaccionar instintivamente y de forma instantánea, puesto que esta tecnología corresponde a la capa más vulnerable e interior de nuestro Escudo de Protección, una capa en la que la colisión se considera actualmente inevitable. Todo el proceso debe reflejar lo que hace una abeja para evitar a otras abejas. Debe ocurrir en lo que se tarda en pestañear.”
Pero, a diferencia de una abeja, el coche no se puede desviar hacia arriba o hacia abajo, ni en diagonal; solo se puede mover en dos dimensiones y en la dirección que le permiten girar sus ruedas.
“Por esta razón, en lugar del infinito número de posibilidades que una abeja tiene para evitar a otras abejas, nosotros hemos utilizado una función de rotación, además de aceleración y desaceleración, como medios para que el coche robótico evite las colisiones,” añadió Andoh.
El BR23C utiliza baterías de polímeros de litio, que son más ligeras y tienen una mayor densidad de energía, lo cual significa que duran más que la variedad de iones de litio. Andoh nos cuenta que lo que hace inteligente a este vehículo son sus instintos, no su habilidad para procesar o almacenar datos.
“Este dispositivo solo necesita procesar información cada pocos segundos, y actuar según esos datos. No requiere guardar información ni lógica intuitiva de maniobras previas, por lo que puede funcionar de forma continuada con sólo un par de docenas de KB de memoria. Puede que esto sorprenda, pero no estamos hablando de gigas de memoria, ni siquiera de megas.”
Este es el primer paso para desarrollar nuevas tecnologías de prevención instantánea de colisiones, una tecnología que Nissan vaticina que se introducirá en los coches de serie dentro de diez años.
Otra posible aplicación futura de esta tecnología podría ser la integración de la unidad con un sistema GPS de navegación por satélite para guiar al conductor hasta su destino evitando los obstáculos en el camino.
Puede que la investigación conjunta de Nissan y la Universidad de Tokio con el coche robótico biomimético acabe de empezar, pero esta tecnología inspirada en las abejas ha supuesto el próximo gran paso hacia la creación de tecnologías que algún día nos llevarán a un futuro sin accidentes.
 Estas son las nuevas ayudas del Plan Cambia 360 de Madrid para comprar un coche con etiqueta ECO o CERO
Estas son las nuevas ayudas del Plan Cambia 360 de Madrid para comprar un coche con etiqueta ECO o CERO  Idealista analiza cuáles son las mejores provincias para instalar un cargador de coche eléctrico
Idealista analiza cuáles son las mejores provincias para instalar un cargador de coche eléctrico  Así puedes saber si un patinete eléctrico tiene el certificado obligatorio
Así puedes saber si un patinete eléctrico tiene el certificado obligatorio  Estos son los coches BYD que se venden más que los Tesla
Estos son los coches BYD que se venden más que los Tesla
